





Hit-to-kill ballistic missile defense is the ultimate precision guidance challenge. Many elements of a defense must come together to achieve a long range intercept. One of the most important and difficult parts is known as mid-course discrimination.
Watch the Video
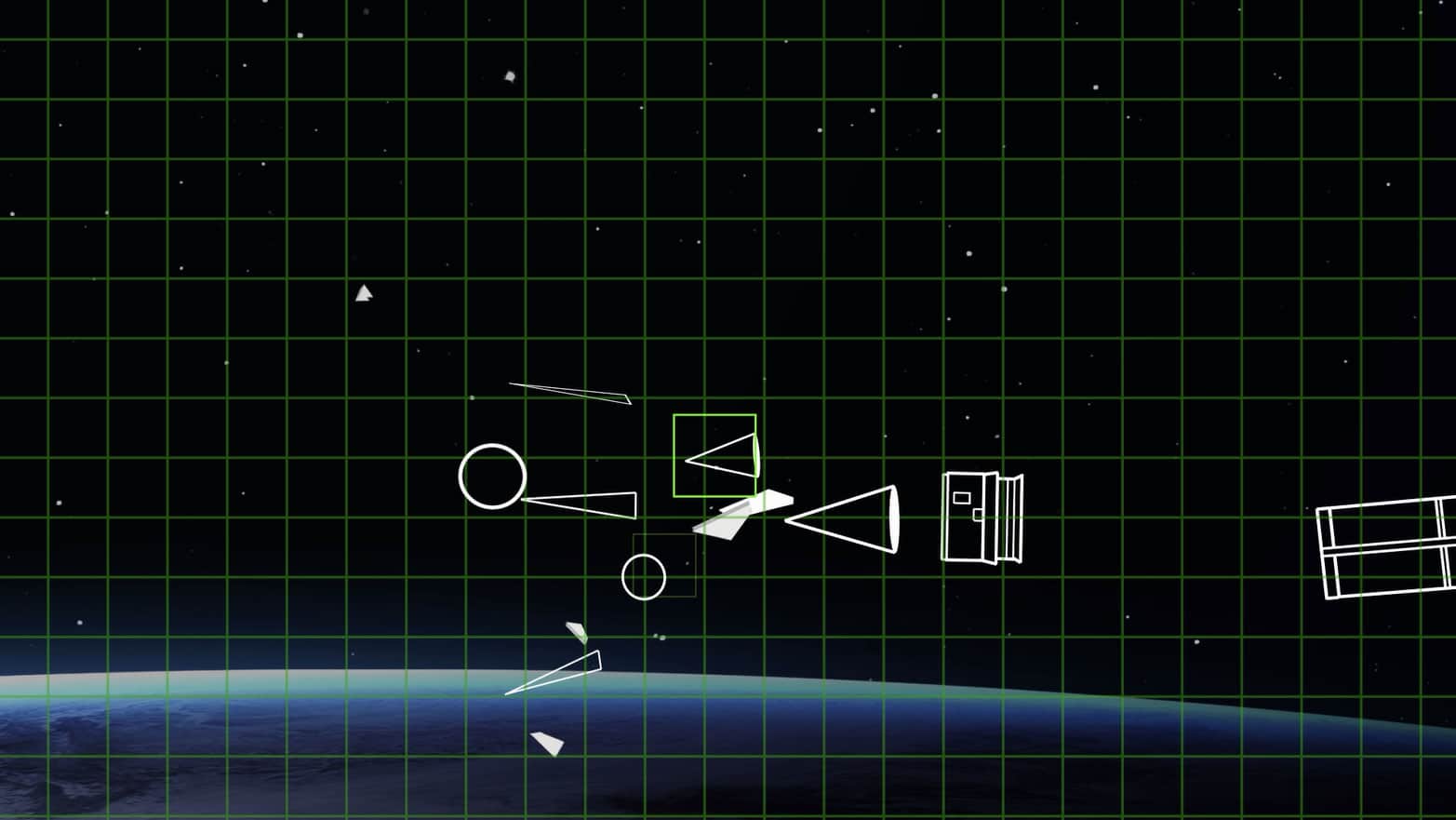
After a ballistic missile launches, its engines burn hot and can be detected by infrared satellites. Outside the Earth’s atmosphere, the missile engines burn out and it reaches its peak velocity. At this point, the missile’s payload, a warhead, usually separates from the rest of the body. The warhead is also accompanied by the flying junk pile of debris created by launching a missile as well as by decoys or other countermeasures designed to complicate the missile defense job. All of these objects move together through space as part of a threat cloud. So for a missile defense system to successfully destroy the warhead, its various sensors must first discriminate it from among the various other parts of the cloud.
The key to successful discrimination is the sensor architecture. Sea and land-based radars provide one picture of the threat cloud. Lower frequency radars are able to track the threat cloud but have trouble distinguishing within it. Once queued, higher frequency or X-band radars provide much sharper images of objects within the cloud. But radars are limited by the vantage point and by their technology. Multiple phenomenologies can provide a more complete rendering and classification. Air or space-based sensors provide still other perspectives with greater persistence, potentially allowing for birth-to-death tracking. And infrared sensors show not just objects but their heat signature, especially low orbit satellites looking sideways comparing the objects against the coldness of space.
Currently, U.S. homeland missile defense is dependent upon only terrestrial radars. This places a large burden on the sensor network and makes it harder to identify the objects. That, in turn, means the defender has to engage more of the objects in the cloud so as not to miss the warhead; either by firing more interceptors or multiple kill vehicles atop a single one.
After the interceptors are launched, they receive imagery of the threat cloud which algorithms compare to a threat database to help pick which objects should be engaged. All this is fused with the kill vehicle’s own observations using onboard sensors to make the final determination for intercept. Finally, they move into position to collide with the several targets that could be a warhead.
The discrimination challenge is hard but not insurmountable. An efficient and robust discrimination system should include a mix of sensors with different technologies from different domains on land, sea, air, and space.